Correction du TD n°3 : Modélisations cinématiques - Singularités#
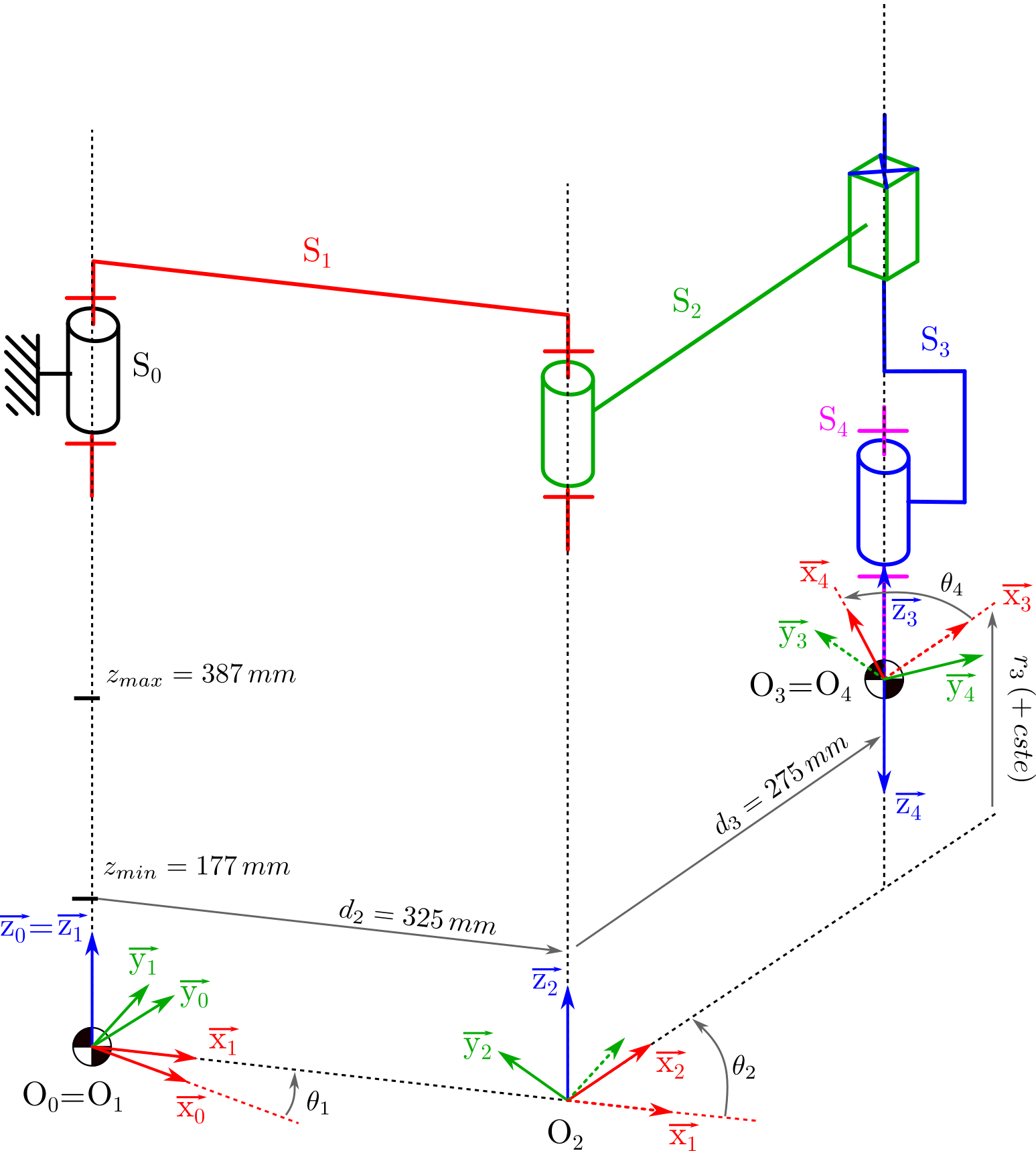
On étudie le robot Scara 4 axes, référencé « s600 » de marque Adept donné en Fig. 44 :

Fig. 44 Robot SCARA s600#
Pour cette étude, on tiendra pas compte des courses de chaque axe afin de ne pas être limité dans les mouvements ; on négligera de même les potentielles collisions.
Modélisations cinématiques#
Calcul analytique#
Question 1.1 : A partir du schéma cinématique et du paramétrage DHm effectué au TD n°1, déterminer les expressions des vecteur rotation et vecteur vitesse du référentiel associé à l’effecteur \(\mathcal{R}_{\text{eff.}}\) dans son mouvement par rapport au référentiel de base \(\mathcal{R}_0\).
On utilisera préférentiellement la composition du mouvement et la relation de changement de point pour le calcul du vecteur vitesse.
Solution
Le paramétrage du robot Scara tel qu’il a été effectué dans le TD1 est proposé en annexe.
On cherche \(\overrightarrow{V_{O_4 \in 4/0}}\) et \(\overrightarrow{\Omega_{4/0}}\)
1 - Vecteur vitesse :
\( \overrightarrow{V_{O_2 \in 2/1}} = 0 \text{ car } O_2 \in \text{ axe } 2/1 \quad \text{ et } \quad \overrightarrow{V_{O_1 \in 1/0}} = 0 \text{ car } O_1 \in \text{ axe } 1/0 \)
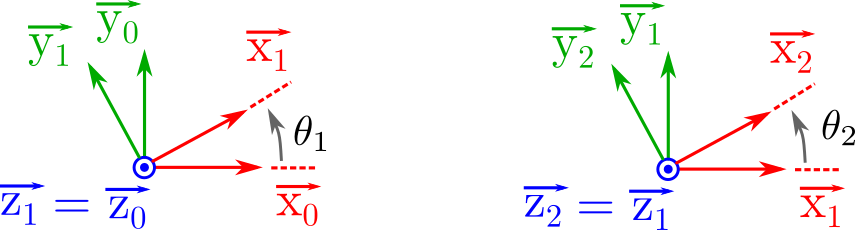
En utilisant les figures de changement de repère on exprime \(\overrightarrow{V_{O_4 \in 4/0}}\) dans le repère \(\mathcal{R}_0\).
2 - vecteur taux de rotation :
Question 1.2 : En déduire l’expression de la matrice jacobienne \(\mathbf{J}\) et donc le Modèle Cinématique Direct (MCD).
Solution
Il suffit d’exprimer sous forme matricielle \(\dot{\mathbf{X}} = \mathbf{J} (\mathbf{Q}) \cdot \dot{\mathbf{Q}}\) :
La Jacobienne dépend de la configuration du robot (ici seulement de \(\theta_1\) et \(\theta_2\)).
Attention le résultat n’est en aucun cas une matrice homogène ! ne pas confondre. Ici on à 4 colonnes représentant la dérivé temporelle des 4 paramètres articulaires \(\dot{\mathbf{Q}} = (\dot{\theta_1}, \dot{\theta_2}, \dot{r_3}, \dot{\theta_4}) \) et 4 lignes représentant les dérivées temporelles des 4 paramètres définissant la position et l’orientation de l’effecteur dans l’espace des tâches \(\dot{\mathbf{X}} = (\dot{\omega}, \dot{x}, \dot{y}, \dot{z})\).
Différentiation - dérivation#
Question 1.3 : Retrouver rapidement le résultat précédent par dérivation du Modèle Géométrique Direct établi au TD n°1.
Solution
MGD trouvé au TD n°1 :
Dérivation du MGD :
La dérivation du MGD nous permet d’obtenir le mêm résultat que précédemment. Dans le cas ou la structure du robot est complexe, on préférera calculer par la cinématique.
Jacobien de base#
Question 1.4 : Déterminer le jacobien de base \(\mathbf{J}_n\) à partir des contributions de chaque liaison \(\mathbf{J}_{n,k}\).
Solution
\(\mathbf{\Omega}\) est une fonction du paramétrage.
Rappel : Le jacobien de base représente la contribution de l’articulation (liaison) à la vitesse du référentiel extrémité. \(k\) désigne la k-ième liaison
Ici on a un robot a 4 axes donc 4 jacobien de base élémentaires (3 rotations + 1 translation).
d’ou \(J_4 = \left(J_{4,1}, J_{4,2}, J_{4,3}, J_{4,4} \right)\). L’ordre des jacobiens de base dépend du vecteur \(\dot{\mathbf{Q}}\). Ici le jacobien de base correspond directement à la matrice Jacobienne J car le robot est simple et paramétré directement.
\(\overrightarrow{\Omega}\) que sur \(\overrightarrow{z}_0 \) dans le cas de ce robot. Les lignes représentent le paramétrage \(^0 \omega_4\) et \( ^0 V_4\). Les colonnes représentes la dérivée temporelle des variables articulaires.
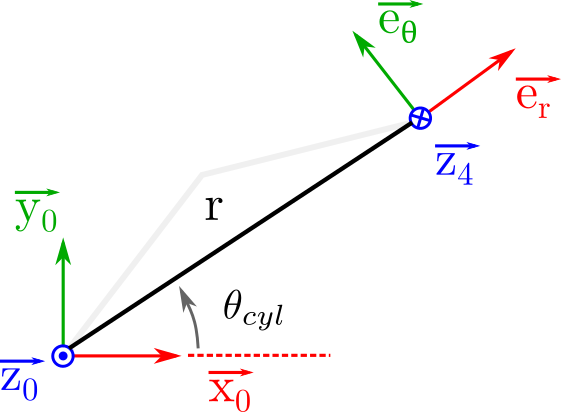
On se donne maintenant comme variables de l’espace des tâches les composantes dans un système de coordonnées cylindriques (au lieu du système cartésien classique).
Question 1.5 : Déterminer l’expression de la matrice \(\mathbf{\Omega}\), lien entre le jacobien de base \(\mathbf{J}_n\) et les variables de l’espace des tâches pour la cinématique \(\dot{\mathbf{X}}\).
Solution
La matrice \(\mathbf{\Omega}\) permet de faire le lien entre différents paramétrages.
Coordonnées cylindrique \(r \cdot \overrightarrow{e_r}\), \(\theta_{cyl}\) et \(z \cdot \overrightarrow{e_z}\).
Inversion du paramétrage
il est souvent plus simple de déterminer \(\mathbf{\Omega}\) a partir du système d’équation (24)
Le vecteur \((^0 \omega_4, ^0 V_4)\) correspond ici au vecteur \((\dot{\omega}, \dot{x}, \dot{y}, \dot{z})\)
1 - rotation : \(\dot{X_r} = \Omega_r \times ^0 \omega_4\) Or ici le paramétrage en coordonnée cylindrique ne change pas le paramétrage en orientation d’ou : \(\Omega_r = 1\)
2 - translation :
Attention au calcul de la diférentielle de \(\text{atan2}(y,x)\)
d’ou la matrice \(\mathbf{\Omega}\)
Les lignes de la matrice représentent le nouveau paramétrage dans l’espace des taches \(\mathbf{X_{cyl}} = (\dot{\theta}, \dot{r}, \dot{\theta_{cyl}}, \dot{z})\).
Recherche des singularités#
Question 2.1 : A partir de l’étude de la jacobienne \(\mathbf{J}\), déterminer les singularités pour ce robot.
Solution
Les singularités correspondent aux valeurs articulaires pour lesquelles le déterminant de la jacobienne est nulle.
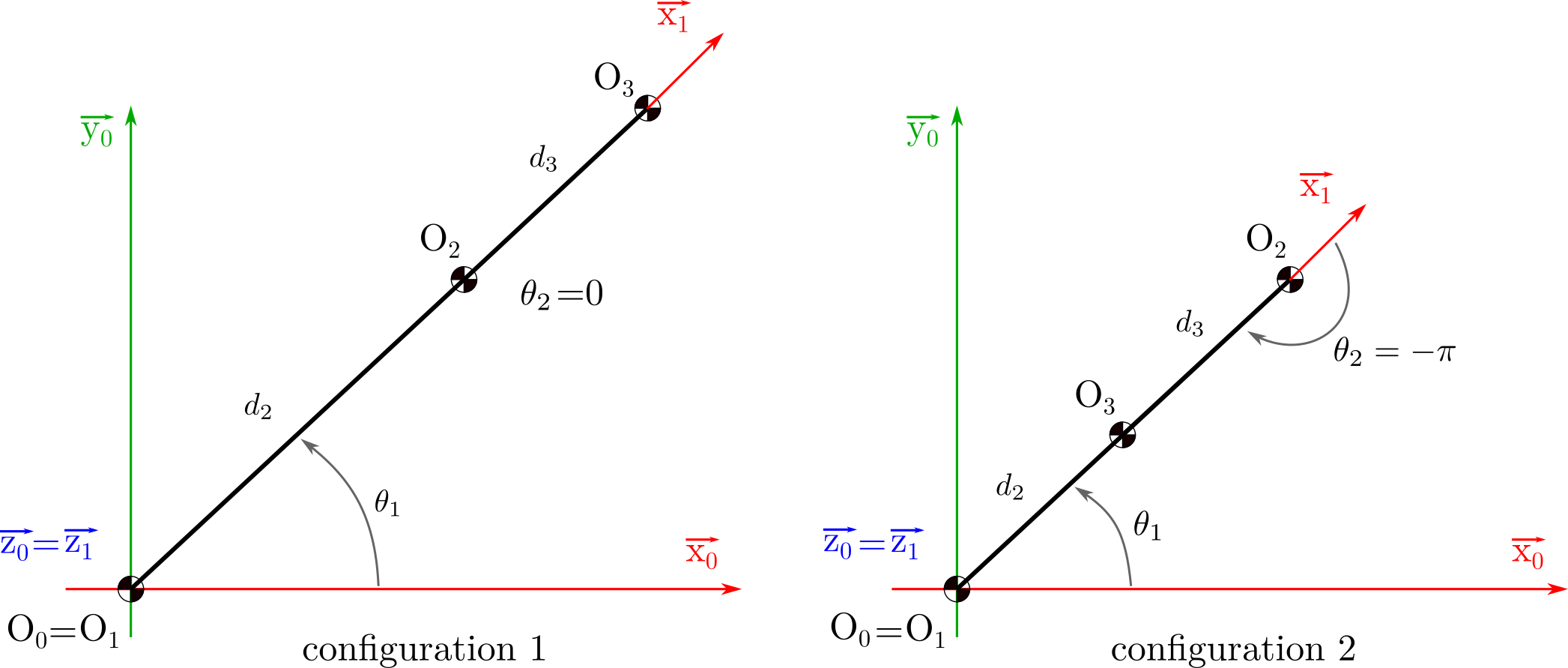
Question 2.2 : Représenter sur un schéma cinématique les différents cas rencontrés ; Expliquer les singularités.
Solution
Les figures suivantes représentent 2 configurations différentes présentant des singularités. Dans la première configuration, il y a une incapacité a généré un mouvement selon \(\overrightarrow{x_1}\), dans la seconde, une incapacité a généré un mouvement selon \(- \overrightarrow{x_1}\).
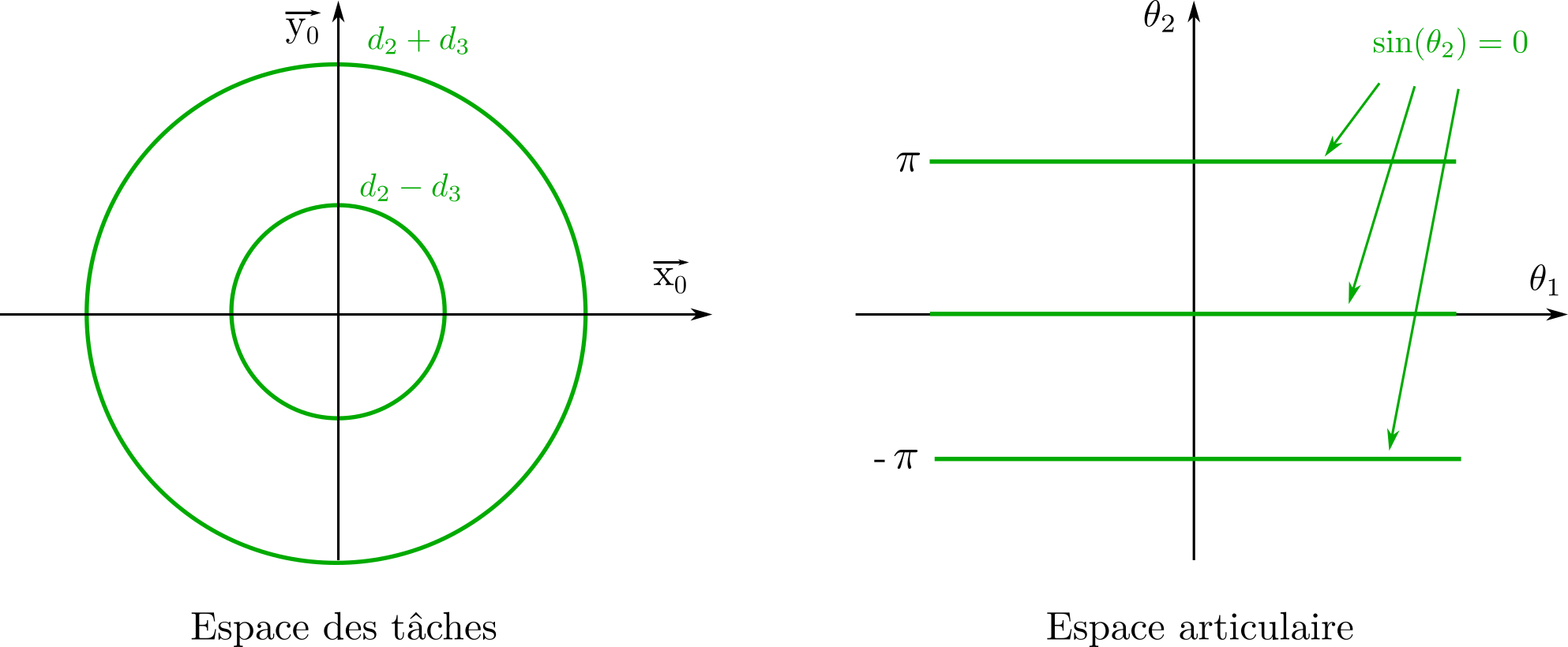
Question 2.3 : Représenter les branches de singularités dans l’espace des tâches et dans l’espace articulaire.
Solution
Les figures suivantes présentent la position des singularités dans les deux espaces :
Synthèse#
Analyser le modèle du robot implémenté dans l’application « RoboDK ». Pour cela,
modifier le paramétrage du robot pour éviter tout problème lié aux courses ;
positionner le robot dans sa configuration singulière « repliée » ;
solliciter le robot par des translations « tangentes au rayon » (attention au pas de calcul).
Annexes#
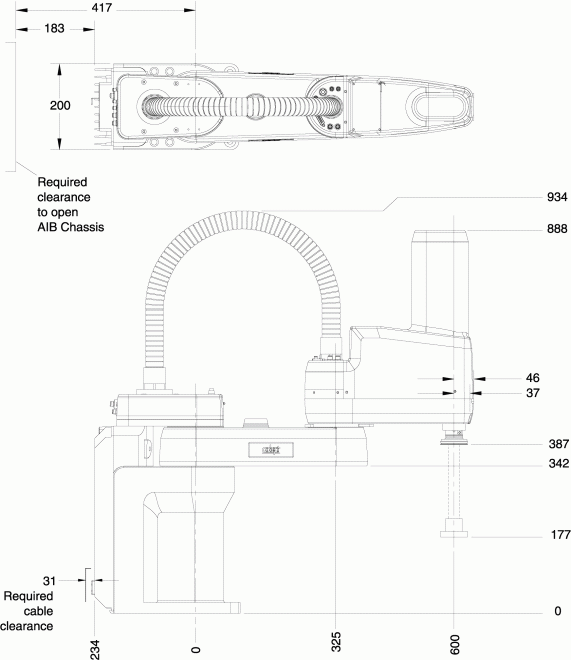
Fig. 45 Caractéristiques dimensionnelles#
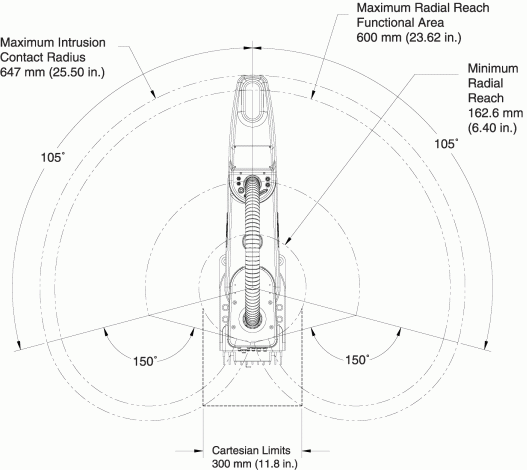
Fig. 46 Surface balayée par l’effecteur#
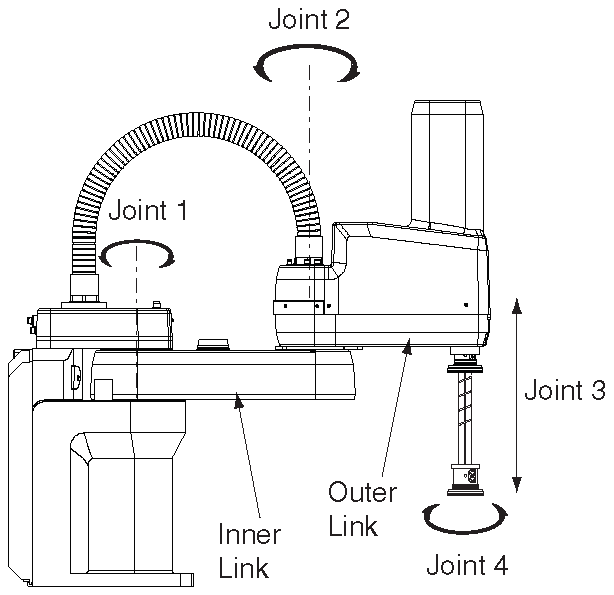
Fig. 47 Extrait de documentation : cinématique#
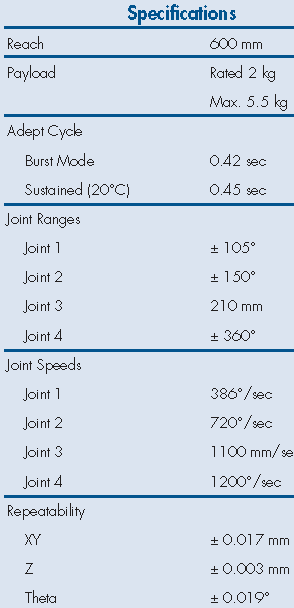
Fig. 48 Extrait de documentation : spécifications#
Solution
Paramétrage du robot scara : cf TD 1